2024春季学期选了xhz老师的限选课深度强化学习,恰巧也在研究这方面的内容,于是打算写个笔记。
MDP, Value Iteration and Policy Iteration
MDP Basics
Definition of MDP
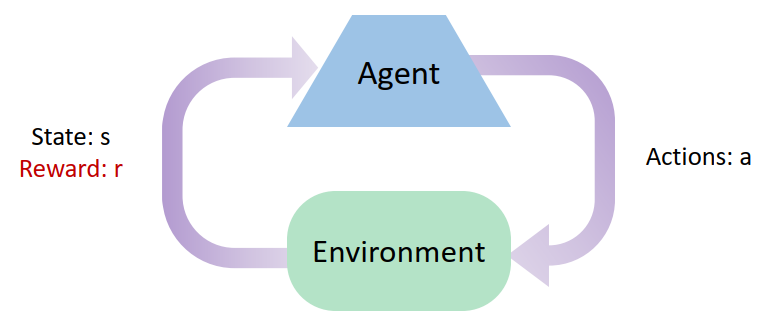
Markov Decision Process (MDP) 是一个决策过程数学模型,直观地来说:一个智能体 (agent) 处在一个环境中,环境处于不同的状态 (state);每一步,agent 可以得知环境的部分或全部 state 信息,这部分信息称为 agent 的观测 (observation);通过 observation,agent 每一步会作出决策,给出一个动作 (action);这个动作会影响环境,环境有概率转移到另一个 state;同时,环境根据潜在的奖励函数 (rewards) 来给 agent 提供奖励。Formally:
Definition:
An MDP is a 4-tuple $(S, A, T, R)$:
- $S$ is a set of states called the state space.
- $A$ is a set of actions called the action space.
- $T(s, a, s^{\prime})=Pr(s_{t+1}=s^{\prime}|s_t=s, a_t=a)$ is the probability that action $a$ at $s$ leads to $s^{\prime}$, called the transition fuction (also model or dynamics).
- $R(s, a, s^{\prime})$ is the immediate reward received after transitioning from state $s$ to state $s^{\prime}$, due to action $a$.
当然这只是最简单的定义,还可以根据情况的不同引入额外的东西。比如系统初始状态的分布函数 (initial state distribution),一个一旦到达就直接停止的结束状态 (terminal state)。再比如某些情况下,环境可能是 partially observable 的,agent 无法观测到环境的整个 state (比如打扑克的时候,你无法看到对方手上的牌,这是 partially observable 的,但是下围棋的时候,你可以看到棋盘上所有的东西,这是 fully observable 的),此时需要在定义中引入 a set of observations $O$,此时的 MDP 称为 Partially Observable MDP (POMDP)。
定义中 Markov 的意思是:给定当前状态之后,未来与过去就无关了,即 $Pr(s_{t+1}|s_t, a_t, s_{t-1}, a_{t-1}, …, s_0)=Pr(s_{t+1}|s_t, a_t)$。可以认为过去的信息都被浓缩到当前的 state 中了。
An Example
用一个简单的例子来加深理解:
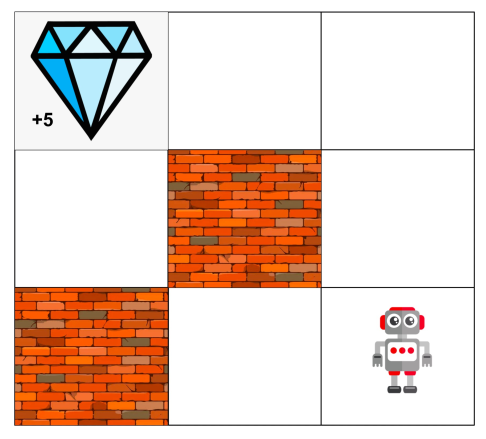
比如一个 agent 位于这样一个 grid world 中
- 每一时刻的 state 就是 agent 的位置。
- action 是上下左右。
- $T$ 我们定义为,有 80% 的可能,agent 的 transition 与其 action 一致;有 10% 的可能,无论什么 action,agent 都往左;有 10% 的可能,无论什么 action,agent 都往右。
- 只有在 agent 吃到钻石的时候才会有 reward。
Policy
以上我们主要关注环境,接下来我们看 agent,我们将 agent 从 state/observation 得到 action 的决策称为 policy:
Definition:
Policy $\pi$ 是一个条件概率密度函数 $\pi(a|s)$,表示 agent 在 state $s$ 时采取 action $a$ 的概率。
Utility
RL 的目标是学出一个好的 policy,那么这个 “好的” 该如何进行评价。直观来看,我们可以将 agent 放在某个 initial state,让其根据自己的 policy 进行运动固定的步数,或是等到最后结束。那么问题就到了,agent 跑出的这个序列 $(s_0, a_0, r_0, s_1, a_1, r_1, …, s_t, a_t, r_t)$ (称为 trajectory) 该如何评价。我们引入 Reward Hypothesis, 即MDP中所有的目标都应被 reward 定义,而不牵扯到其他的量。那么可以将 trajectory 中的 rewards 单独抽出来 $(r_0, r_1, r_2, …, r_t)$。我们希望有一个函数 (Utility) 能够将这个 rewards 序列映射成一个标量,这样有助于比较不同 trajectories 的优劣。
一种方法是直接加起来,即 additive utilities: $U([r_0, r_1, r_2, …]) = r_0+r_1+r_2 + …$
考虑到现实生活中,当下的 reward 往往比之后的 reward 更具有价值 (当下给你一块钱往往优于两天后给你一块钱),一个更常用的 utility 是 discounted utilities: $U([r_0, r_1, r_2, …]) = r_0+\gamma r_1+\gamma^2 r_2 + …$。其中 $\gamma$ 称为 discounted factor。
Optimal Quantities
直观上定义 optimal quantities:
- Optimal policy: $\pi^*(s)$ = optimal action from state $s$.
- Optimal value/utility of a state $s$: $V^*(s)$ = expected utility starting from $s$ and acting optimally.
- Optimal Q value: $Q^*(s,a)$ = expected utility taking action $a$ from state $s$ and acting optimally.
Formally 可以递归地定义这些量:
$$\pi^{*}(s)=\argmax_a Q^{*}(s,a)$$ $$V^{*}(s)=\max_a Q^{*}(s,a)$$ $$Q^{*}(s,a)=\sum_{s^{\prime}}T(s,a,s^{\prime})[R(s,a,s^{\prime})+\gamma V^{*}(s^{\prime})]$$
从以上两个式子我们可以消去 $Q^{*}$ 得到 $V^{*}$ 满足的等式:
$$V^{*}(s)=\max_a \sum_{s^{\prime}}T(s,a,s^{\prime})[R(s,a,s^{\prime})+\gamma V^{*}(s^{\prime})]$$
称为 Bellman Equation。
Value Iteration
RL 的最终目标是得到 $\pi^{*}$,我们可以利用 $V^{*}$ 来得到 $\pi^{*}$。一种可行的用来得到 $V^{*}$ 的方法称为 Value Iteration,其利用了 Bellman Equation。
假设 MDP 在 $k$ 步后结束,定义 $s$ 的 optimal value 为 $V^{*}_k(s)$,那么有:
$$V_0^{*}(s)=0$$ $$V_{k+1}^{*}(s)=\max_a \sum_{s^{\prime}}T(s,a,s^{\prime})[R(s,a,s^{\prime})+\gamma V_k^{*}(s^{\prime})]$$
迭代计算直至收敛,即可得到 $V_{\infty}^{*}=V^{*}$。
VI 有两个问题:
- VI 每一步的时间复杂度为 $O(S^2A)$,因此仅仅适用于 discrete case,并且要求 $S$ 和 $A$ 均比较小,无法适用于连续空间。
- Policy 往往会比 Value 收敛得更早,如果能够提前发现 policy 已经收敛会更好。
Policy Iteration
Policy Evaluation
上面介绍的 $V^{*}$ 是 optimal policy 的 value function,我们也可以给定一个 policy $\pi$,计算其对应的 value function $V^{\pi}$,这个计算过程称为 Policy Evaluation。
$$V^{\pi}(s) = \text{expected total discounted rewards starting in } s \text{ and following } \pi$$
计算过程类似于 Value Iteration,也是从相应的 Bellman Equation 入手进行迭代计算:
$$V^{\pi}(s)=\sum_{s^{\prime}}T(s,\pi(s),s^{\prime})[R(s,\pi(s),s^{\prime})+\gamma V^{\pi}(s^{\prime})]$$
Policy Evaluation 一步花费时间 $O(S^2)$。
Policy Improvement
假设我们知道一个 MDP 的 value function, 如何得到在这个 value function 下的 optimal policy。显然可以在某个状态 $s$ 遍历所有的 action $a$,看哪个 $a$ 的收益最大,即:
$$\pi(s)=\argmax_a \sum_{s^{\prime}}T(s,a,s^{\prime})[R(s,a,s^{\prime})+\gamma V(s^{\prime})]$$
这个过程就是 policy improvement。
Policy Iteration
结合 Policy Evaluation 和 Policy Improvement,我们可以用另一种方法(不同于 Value Iteration)来得到 $\pi^*$。
循环以下两步直至 policy 收敛:
- Step 1: Policy Evaluation。对当前的 policy 进行 policy evaluation。
- Step 2: Policy Improvement。对 Step 1 中得到的 value function 进行 policy improvement,得到新的 policy。
这就是 Policy Iteration。PI 也可以得到 optimal $\pi^*$,并且在一些情况下比 VI 收敛得更快。
MDP to Reinforcement Learning
不管是 VI 还是 PI,都要求我们知道 MDP 的 $T(s,a,s^{\prime})$ 和 $R(s,a,s^{\prime})$。但是在现实中的大部分情况,我们并不能准确地知道 $T(s,a,s^{\prime})$ 和 $R(s,a,s^{\prime})$,尤其是 $T$,因此需要引入 RL。
RL 的主要思想是:
- 环境会为 agent 的 action 提供 reward 进行反馈。
- Agent 的所有 utility 都被 reward 定义。
- Agent 的目标是 maximize expected rewards。
- 学习只能基于 agent 获取到的 observations, actions, rewards 等信息(不知道真实的 $T(s,a,s^{\prime})$ 和 $R(s,a,s^{\prime})$)。