Lecture 1.3 Regular group convolutions | Template matching viewpoint
Cross-correlations
定义 kernel $k\in \mathbb{L}_2(\mathbb{R}^2)$ 和二维图像 $f\in \mathbb{L}_2(\mathbb{R}^2)$ 之间的 cross-correlations 为:
$$(k\star_{\mathbb{R}^2} f)(\mathbf{x})=\int_{\mathbb{R}^2} k(\mathbf{x}^{\prime}-\mathbf{x})f(\mathbf{x}^{\prime})\mathrm{ d} \mathbf{x}^{\prime}=(\mathscr{L}_{\mathbf{x}} k, f)_{\mathbb{L}_2 (\mathbb{R}^2)}$$
RHS 的标记是定义出来的。
- Note: 这其实就是 CNN 中的 convolution,但并不是严格意义上的 convolution,严格意义上的 convolution 为:
$$\int_{\mathbb{R}^2} k(\mathbf{x}-\mathbf{x}^{\prime})f(\mathbf{x}^{\prime})\mathrm{ d} \mathbf{x}^{\prime}$$
Equivariance
Convolutions/cross-correlations 具有平移等变性,即对于 $\forall \mathbf{x}, \mathbf{y}\in \mathbb{R}^2$,有
$$\mathscr{L}_{\mathbf{y}}^{\mathbb{R}^2\rightarrow \mathbb{L}_2(\mathbb{R}^2)}[(k\star_{\mathbb{R}^2}f)(\mathbf{x})]=(k\star_{\mathbb{R}^2}\mathscr{L}_{\mathbf{y}}^{\mathbb{R}^2\rightarrow \mathbb{L}_2(\mathbb{R}^2)}f)(\mathbf{x})$$
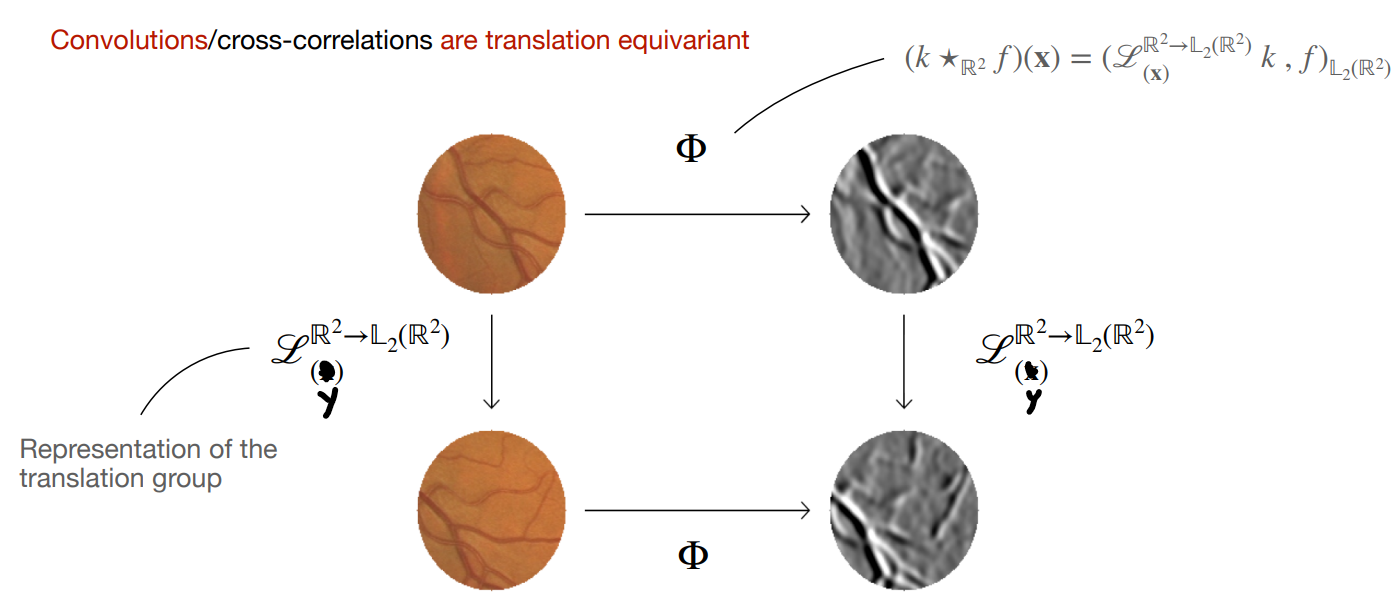
Proof: $$LHS=(k\star_{\mathbb{R}^2} f)(\mathbf{x}-\mathbf{y})=(\mathscr{L}_{\mathbf{x}-\mathbf{y}}^{\mathbb{R}^2\rightarrow \mathbb{L}_2 (\mathbb{R}^2)} k, f)_{\mathbb{L}_2 (\mathbb{R}^2)}=(\mathscr{L}_{\mathbf{x}}^{\mathbb{R}^2\rightarrow \mathbb{L}_2 (\mathbb{R}^2)} k, \mathscr{L}_{\mathbf{y}}^{\mathbb{R}^2\rightarrow \mathbb{L}_2 (\mathbb{R}^2)} f)_{\mathbb{L}_2 (\mathbb{R}^2)}=RHS$$
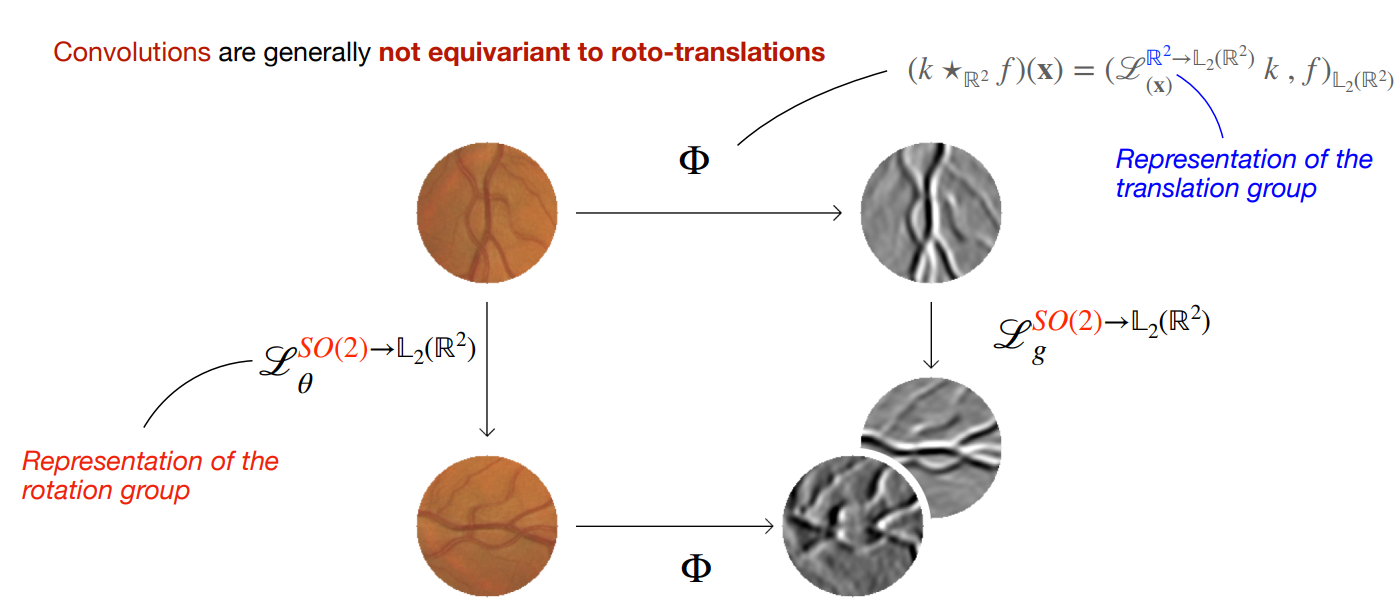
一般情况下,卷积操作对于旋转操作并不具有等变性。
$$\mathscr{L}_{\theta}^{SO(2)\rightarrow \mathbb{L}_2(\mathbb{R}^2)}[(k\star_{\mathbb{R}^2}f)(\mathbf{x})]\neq (k\star_{\mathbb{R}^2}\mathscr{L}_{\theta}^{SO(2)\rightarrow \mathbb{L}_2(\mathbb{R}^2)}f)(\mathbf{x})$$
Regular group CNN
接下来,我们从构造 roto-translation equivariant 的卷积操作入手,一步步搭建 regular group CNN。
Lifting correlations
首先,cross-correlation 可以写为:
$$(k\star_{\mathbb{R}^2} f)(\mathbf{x})=(\mathscr{L}_{\mathbf{x}}^{\mathbb{R}^2\rightarrow \mathbb{L}_2 (\mathbb{R}^2)} k, f)_{\mathbb{L}_2 (\mathbb{R}^2)}$$
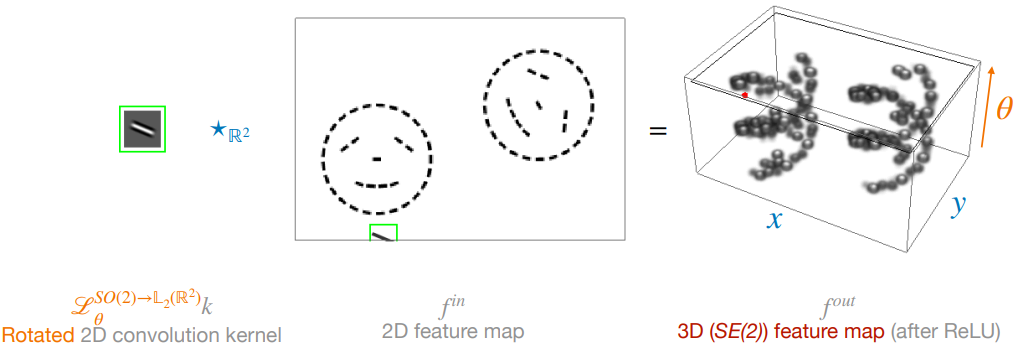
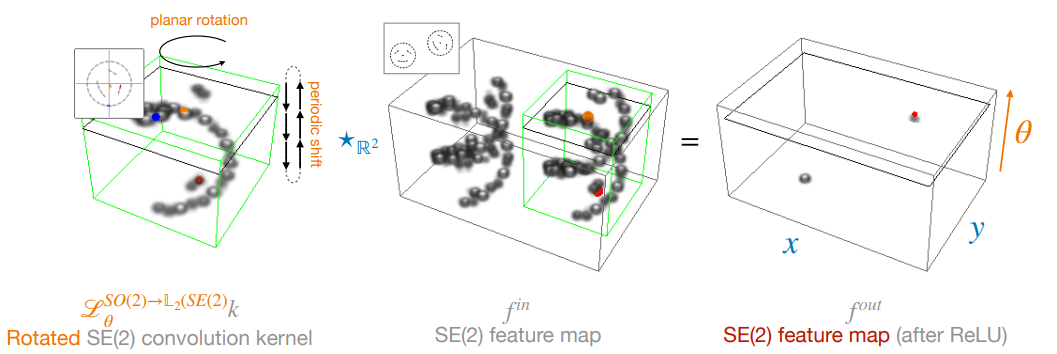
类似地,对于 $\forall k, f\in \mathbb{L}_2 (\mathbb{R}^2)$,我们定义 lifting correlations 为:
$$(k\tilde{\star} f)(\mathbf{x}, \theta)=(\mathscr{L}_{(\mathbf{x},\theta)}^{SE(2)\rightarrow \mathbb{L}_2 (\mathbb{R}^2)} k, f)_{\mathbb{L}_2 (\mathbb{R}^2)}=(\mathscr{L}_{\mathbf{x}}^{\mathbb{R}^2\rightarrow \mathbb{L}_2 (\mathbb{R}^2)} \mathscr{L}_{\theta}^{SO(2)\rightarrow \mathbb{L}_2 (\mathbb{R}^2)} k, f)_{\mathbb{L}_2 (\mathbb{R}^2)}$$
这就相当于将 kernel $k$ 的每一种旋转以及每一种平移都与 $f$ 做一次点积操作,最后得到一个 3D feature map。
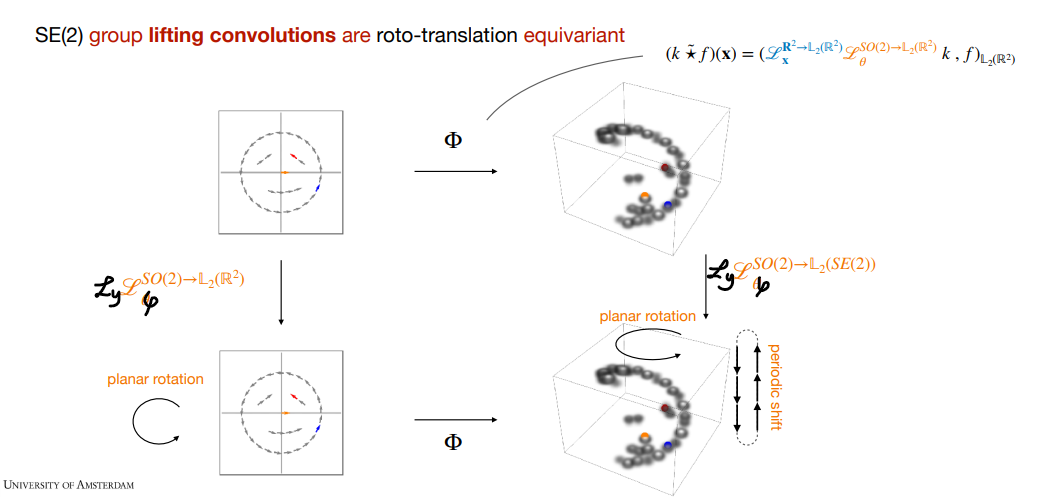
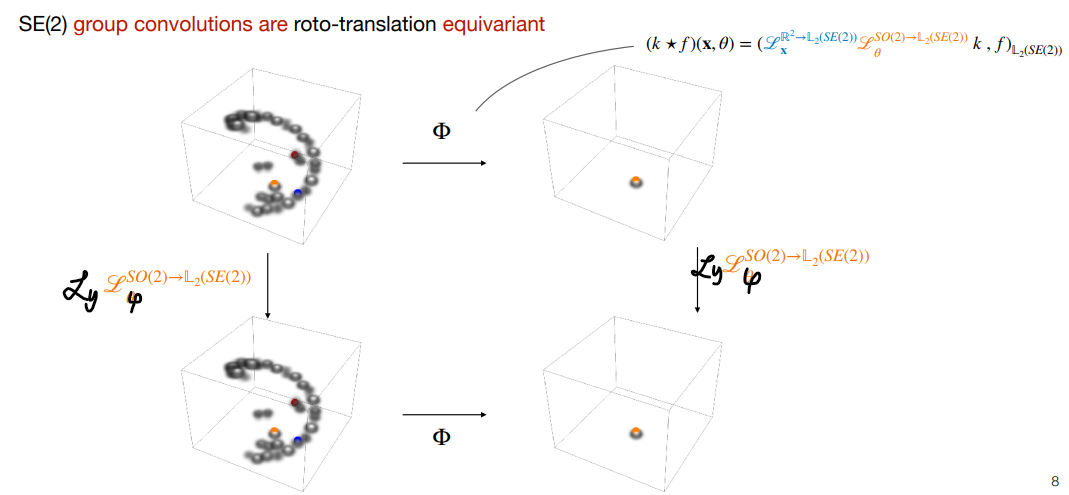
Lifing correlations 具有 roto-translation 等变性,即(省略上标):
$$\mathscr{L}_{\mathbf{y}} \mathscr{L}_{\varphi} (k\tilde{\star} f)(\mathbf{x}, \theta) = (k\tilde{\star} \mathscr{L}_{\mathbf{y}} \mathscr{L}_{\varphi} f)(\mathbf{x}, \theta)$$
Proof: $$LHS=(k\tilde{\star} f)(\mathbf{y},\varphi)^{-1} (\mathbf{x},\theta)=(\mathscr{L}_{\mathbf{y}} \mathscr{L}_{\varphi} \mathscr{L}_{\mathbf{x}} \mathscr{L}_{\theta} k, f)_{\mathbb{L}_2 (\mathbb{R}^2)}=(\mathscr{L}_{\mathbf{x}} \mathscr{L}_{\theta} k, \mathscr{L}_{\mathbf{y}} \mathscr{L}_{\varphi} f)_{\mathbb{L}_2 (\mathbb{R}^2)}=RHS$$
Group correlations
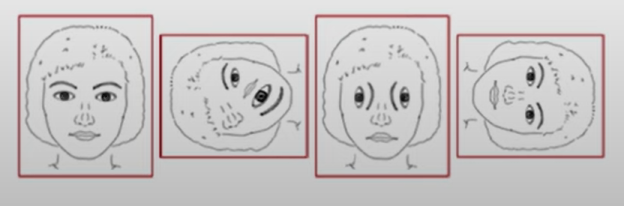
Lifting correlations 可以学到 low-level features,比如要匹配人脸,某个 kernel 可能学到了眼睛,某个 kernel 可能学到了鼻子。如果此时直接对 $\theta$ 轴进行投影,各部分不同的朝向可能会导致相同的投影,如下图所示。
所以需要后续的 layers 用其他 kernels 来匹配全局信息。对于 $\forall k, y \in \mathbb{L}_2 (SE(2))$,定义 group correlations 为:
$$(k\star f)(\mathbf{x}, \theta)=(\mathscr{L}_{(\mathbf{x},\theta)}^{SE(2)\rightarrow \mathbb{L}_2 (SE(2))} k, f)_{\mathbb{L}_2 (SE(2))}=(\mathscr{L}_{\mathbf{x}}^{\mathbb{R}^2\rightarrow \mathbb{L}_2 (SE(2))} \mathscr{L}_{\theta}^{SO(2)\rightarrow \mathbb{L}_2 (SE(2))} k, f)_{\mathbb{L}_2 (SE(2))}$$
Group correlations 将两个 3D feature maps 映射为一个 3D feature map。
类似可以证明,group correlations 也是 roto-translation equivalent 的。
网络架构
将上面说的 lifting correlations 和 group correlations 连起来,就得到了一个 regular group CNN 最简单的样子。可以在后面再加上 projection layer 等层,将 $\theta$ 轴去掉,得到一个二维图像。我们构造了一个对 roto-translation 具有等变性的 CNN,当然也可以以类似的方法构造对 scale-translation 具有等变性的 CNN,如下图所示。
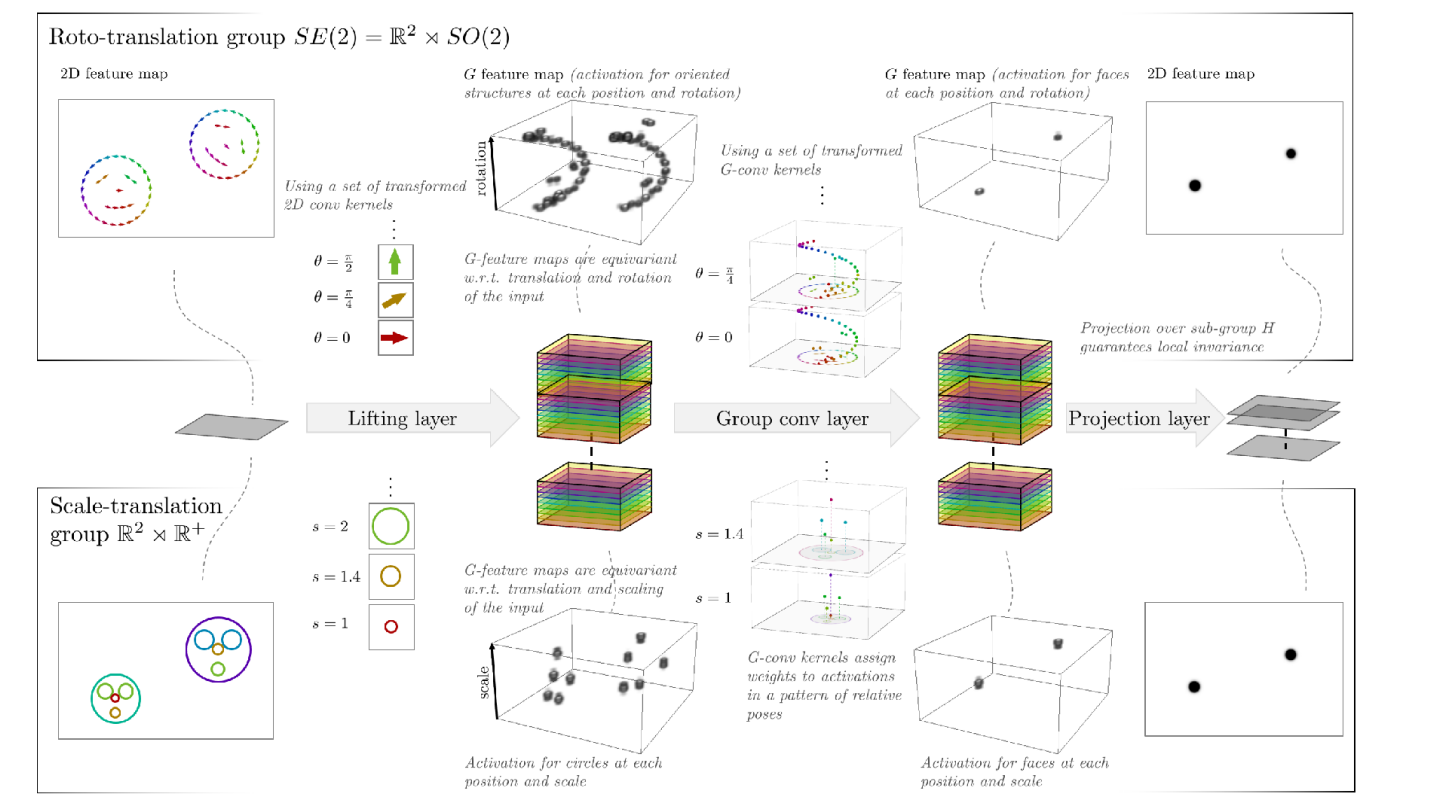
当然,我们目前只得到了一个二维图像,下一节会以细胞识别为例子,构造一个完整的 regular group CNN。